免費服務電話400-668-2041


近年來機械手碼垛技術發展甚為迅猛這種發展趨勢是和當今大米加工廠的大型化、規模化和集團化發展趨勢相適應的。物料被定量包裝成袋后如何能有效地將料袋高速、規則地碼成垛越來越成為滿足大批量生產合理利用庫存空間的迫切需要所以料袋碼垛機的高效、可靠運轉就成了生產正常運行的基本保證。昱莊機械手碼垛機以其柔性工作能力和小的占地面積,能夠同時處理多種物料和碼垛多個料垛,愈來愈受到廣大用戶的青睞并迅速占據碼垛市場。



昱莊YZ-RP 碼垛機器人
昱莊機械手碼垛機的原理
機械手碼垛機是由轉位機、組機、垛機械手、托盤倉、碼垛平臺、垛盤輸送機等幾個重要部分組成。其工作原理如圖1所示。
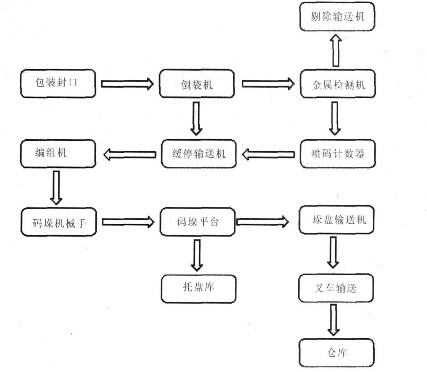
圖1 機械手碼垛機工作原理
當料袋由緩停輸送機送到轉位機后,轉位機根據轉位要求將料袋轉過0或90°,然后將料袋送到編組機由編組機將料袋按縱向3袋、或橫向2袋這兩種形式進行編組,編組后的料袋經碼垛機械手在碼垛平臺上按5袋/層進行整形及碼垛,當碼完層后由垛盤輸送機輸送到叉車工作位置最后由叉車運至倉庫。
例如機械手碼垛機可以采用西門子ES7-226PLC進行控制用西門子觸摸屏對畫面進行組態,通過和PLC的數據通訊來控制和顯示碼垛自動循環全過程。
電氣控制系統有以下特點:當碼垛機用于包裝、碼垛生產時可用其自動控制系統根據需要使其處于自動或手動狀態。當設備出現電機過載、出垛積壓、夾包、空托盤不到位等任何一種故障時,碼垛機將停機或聲光報警,具有自動化保護功能。消除異常后,能重新在原停機狀態下恢復運行。當碼垛機停機、停電時可由PLC保持原運行狀態避免重復記憶。





